

/ Engineering Journey
Projects
Engineering knowledge becomes meaningful when applied to real systems. These projects reflect practical challenges, lessons learned, and the ongoing development of skills across software, electronics, and mechanical systems.



— Technical domains
Areas of Engineering Focus
• Domain 01
• Domain 02
• Domain 03
• Domain 04
System Design
System Integration
Control Systems
Mechanical Design
System architecture, workflow design, interface definition, and technical planning
ROS2 integration, client-server communication, databases, APIs, and hardware-software connectivity
State machines, task management, kinematics, motion control, and robot behavior logic
CAD modeling, structural design, mechanism development, and hardware assembly.
Built. Tested. Documented.
SYSTEM DESIGN & INTEGRATION
Mechanical & Control System
Implementing forward and inverse kinematics in C to translate user-defined X-Y coordinates into accurate joint-angle commands for a simulated SCARA robot.

System Design & Integration
CONTROL SYSTEM
System Design
DUST: IoT Factory Transport System
Tubot: Storm Drain Inspection Robot Service
Built an IoT-based factory transport prototype connecting a line-tracing AGV, RFID position tracking, facility modules, GUI, database, and central control system into one coordinated workflow.
Proposed an AI-enabled patrol robot service for storm drain inspection, connecting GPS-tagged condition photos with a platform for maintenance prioritization.
System Design & AI Vision
Data Analysis
GUI & LOGIC
Neighbot: AI Patrol Vision System
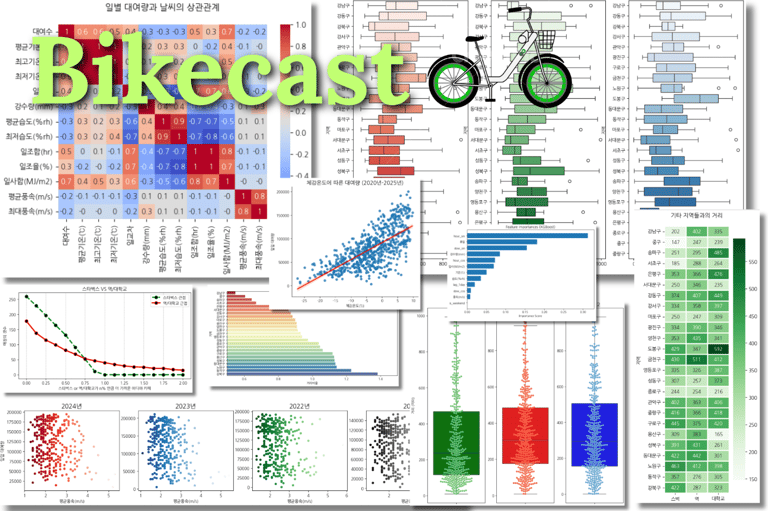
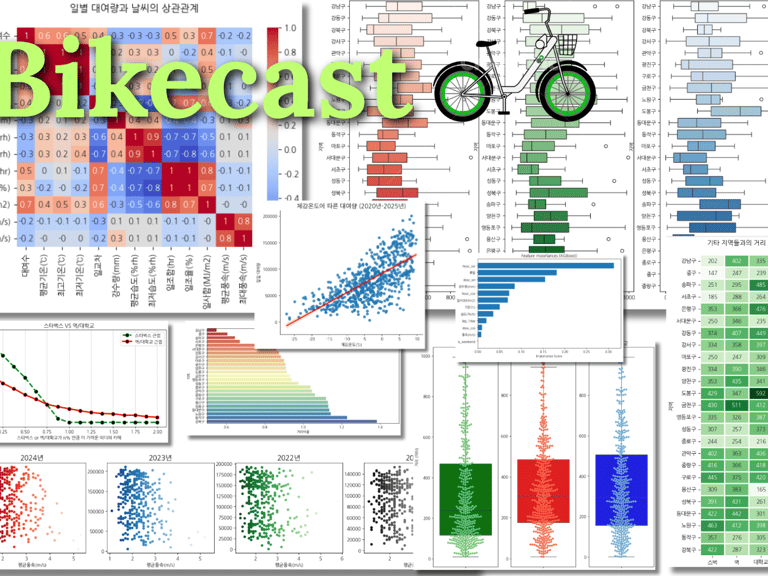
BikeCast: Public Bike Demand Analysis
Calculator Logic with PyQt GUI
Designed an AI vision pipeline for a patrol robot concept, connecting object detection, event confirmation logic, server communication, database records, and an operator GUI for safety monitoring.
Analyzed public bike rental demand by combining rental records with weather forecast data, using Python, MySQL, and visualizations to identify patterns by time, location, season, and weather conditions.
Built a PyQt calculator application with structured input handling, operator logic, clear/backspace functions, and error handling to maintain reliable behavior across common calculator use cases.

The thinking behind the build.
Project pages show the finished systems. The blog goes deeper into the design decisions, tradeoffs, failures, and technical lessons behind the work.